Đưa các trang trại cá tự động đến gần thực tế hơn
Những kế hoạch phát triển công nghệ cho phép các trang trại chăn nuôi cá được vận hành từ xa dưới sự giám sát và sửa chữa do nhân viên trên đất liền kiểm soát và việc sửa chữa được thực hiện bởi ROVs chứ không phải các thợ lặn đã tiến lên thêm một bước.
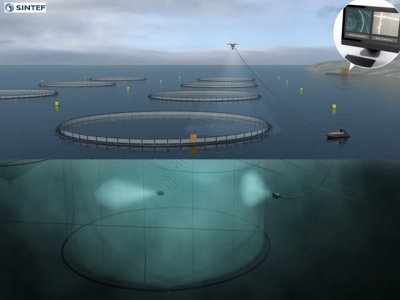
Các dự án như Artifex, Exposed và CageReporter đang cung cấp nền tảng để các hoạt động của trại cá được thực hiện từ xa bằng cách sử dụng ROVs - những con tàu chạy trên mặt nước không người lái và những chiếc máy bay không người lái. Ảnh: SINTEF Ocean
Hoạt động chăn nuôi cá bằng lưới phụ thuộc vào việc bảo trì cẩn thận những chiếc lưới khổng lồ để ngăn đàn cá thoát ra ngoài và để giảm bớt sự tích tụ sinh học trên các tấm lưới.
Việc kiểm tra chi tiết rất quan trọng đối với quá trình này vì trước đây công việc này phụ thuộc vào việc cử thợ lặn lặn xuống để kiểm tra lưới. Nhưng đó là một quá trình rườm rà rắc rối và tốn thời gian. Hiện nay, các phương tiện vận hành từ xa (ROVs) được trang bị máy ảnh và các máy cảm biến thực hiện rất nhiều thao tác kiểm tra. Nhưng những thiết bị này phải được lái (điều khiển) thông qua dây buộc từ bề mặt bởi một người lái (người điều khiển) lành nghề, người mà sự chú ý của họ được phân chia giữa việc điều hướng phương tiện một cách chính xác xung quanh mép lồng (cùng với sự kiểm soát ít hơn độ sâu và hướng đi) và tự mình kiểm tra.
Nếu người điều hành có thể dành nhiều thời gian hơn cho việc kiểm tra thay vì điều hướng thì công việc có thể được hoàn thành nhanh chóng và hiệu quả hơn. Vì vậy, các nhà khoa học từ viện nghiên cứu Na Uy SINTEF đã đưa ra ý tưởng đơn giản hóa nhiệm vụ bằng cách phát triển một mẫu phương tiện hoạt động từ xa (ROV) đầu tiên có khả năng điều hướng tự động ở cấp độ cao.
Walter Caharija - một nhà khoa học nghiên cứu tại SINTEF Ocean cho biết: “Nếu như bạn có thể làm cho phương tiện điều khiển từ xa (ROV) 'bay' dọc theo lưới nuôi một cách tự động thì người lái có thể tập trung nhiều hơn vào việc kiểm tra chất lượng của lưới và triển khai thiết bị phân tích phức tạp hơn để vận hành."
Ông lãnh đạo dự án cái được gọi là Artifex, dự án này được xây dựng dựa trên công trình tiên phong của Per Rundtop - nhà nghiên cứu trước đây của SINTEF.
Nhóm đã có thể thực hiện nghiên cứu trong một trang trại chăn nuôi cá thương phẩm đang hoạt động hoàn chỉnh, được gọi là phòng thí nghiệm quy mô đầy đủ SINTEF ACE (ở gần Trondheim).
Một trong những thách thức là làm cho phương tiện theo dõi các đường viền của lưới từ một khoảng cách cố định khi nó di chuyển xung quanh bên trong chiếc lồng. Điều này đòi hỏi nhiều hơn việc chỉ biết được thiết bị điều khiển từ xa (ROV) đang ở vị trí nào trong nước. Phương tiện cũng cần biết chính xác vị trí của nó trong mối tương quan với chiếc lưới đang di chuyển liên tục. Điều đó đòi hỏi công nghệ có thể phát hiện lưới và đo chính xác khoảng cách từ thiết bị điều khiển từ xa (ROV) tới chiếc lưới, cũng như tính toán tốc độ của thiết bị chạy dọc theo tấm lưới.
Nhóm đã thực hiện công việc ban đầu được cho là sử dụng bản ghi vận tốc Doppler (DVL) được gắn theo phương nằm ngang trên khung của thiết bị ROV có thể là giải pháp. Nhưng họ không chắc liệu một DVL có khả năng “khóa chặt” một cách nhất quán vào một bề mặt không được xác định rõ ràng như một chiếc lưới cá hay không.
DVL đo vận tốc liên quan đến ranh giới (chẳng hạn như đáy) bằng cách phân tích những tiếng vang dội lại từ một bề mặt cứng. Họ cũng có thể đo khoảng cách từ các loại bề mặt khác một cách chính xác bằng cách sử dụng một kỹ thuật tương tự. Tuy nhiên, những loại bề mặt khác này có xu hướng trở thành một hàng rào được xác định rõ ràng hơn (chẳng hạn như đáy biển) hơn là một mắt lưới.
Các nhà nghiên cứu đã liên hệ với Nortek để xem xét những điều có thể xảy ra. Nortek cho biết họ tự tin rằng thiết bị DVL1000 của họ sẽ có thể "nhìn thấy" tấm lưới khi nó di chuyển dọc theo chu vi của chiếc lồng và điều đó thực sự đã đúng như vậy.
DVL là một phần của gói thiết bị hỗ trợ điều hướng cái mà Caharija mô tả là “sự kết hợp cảm biến”. Định vị âm thanh đường cơ sở siêu ngắn (USBL), chỉ số la bàn, hệ thống laze và máy ảnh gắn bên trong đều đóng góp dữ liệu vị trí. Nhưng về việc duy trì khoảng cách với lồng lưới thì DVL mới là đơn vị thực hiện công việc.
Caharija cho biết Nortek DVL đã hoàn thành tốt công việc. Nhóm nghiên cứu đã sử dụng các phương pháp chiếu laze để xác minh các phép đo từ DVL và họ đã xác nhận độ chính xác của nó.
“Nortek là một trong những công ty sáng tạo nhất khi nói đến công nghệ dưới biển, đặc biệt là DVL. Họ thực hiện rất nhiều phát triển nội bộ khiến các thiết bị trở nên rất đáng tin cậy,” ông cho biết thêm.
Thử nghiệm thiết bị ROV trong nuôi trồng thủy sản ở vùng nước sâu hơn, dữ dội hơn
Artifex và các dự án kế nhiệm là một phần của động lực với những tham vọng rộng lớn hơn nhiều. Chúng có thể mở đường cho các trang trại chăn nuôi cá hoàn toàn không cần người vận hành bằng việc giám sát và sửa chữa được điều khiển từ xa bởi nhân viên trên đất liền và việc sửa chữa được thực hiện bởi ROV chứ không phải những thợ lặn như hoàn cảnh hiện nay.
Đội ngũ Artifex cũng đặt mục tiêu lắp thiết bị ROV cùng với một cánh tay robot để thực hiện việc sửa chữa lưới, trong khi các đối tác của dự án đang phát triển một con tàu chạy trên mặt nước không người lái (USV) mà thiết bị ROV có thể được buộc vào, cùng với một chiếc máy bay không người lái để hỗ trợ kiểm tra.
Việc di chuyển các trang trại nuôi cá ra xa bờ hơn nữa là một xu hướng ngày càng tăng khi nông dân tìm cách đáp ứng nhu cầu ngày càng tăng về cá trên toàn cầu. Vì vậy, bước tiếp theo của các nhà nghiên cứu là di chuyển khỏi sự yên tĩnh tương đối của các trang trại nuôi cá gần bờ để kiểm tra thiết bị ROV ở những vùng nước sâu hơn, dữ dội hơn.

Thiết bị ROV hiện được kiểm soát từ một con tàu ở trang trại cá. Một phòng điều khiển trên đất liền kết nối vô tuyến với thiết bị ROV tự động được dự kiến cho tương lai. Ảnh: SINTEF Ocean
Nhóm SINTEF đang thực hiện việc này như một phần của dự án Exposed, đây là một dự án liên doanh giữa các nhà nghiên cứu hàn lâm, các công ty nuôi trồng thủy sản và các công ty công nghệ để phát triển các kỹ thuật mới có chi phí thấp cho nhiều phương diện của hoạt động nuôi cá ở các địa điểm tiếp xúc nhiều hơn.
Ở những vùng nước yên tĩnh hơn gần bờ, một con tàu có thể được gắn vào lưới, điều này làm cho sự tương tác với thiết bị ROV mà nó được buộc vào tương đối dễ dàng. Tuy nhiên, đối với những vị trí tiếp xúc nhiều với vùng biển động mạnh hơn thì việc gắn tàu vào lưới có thể không an toàn, điều này khiến cho quá trình giữ tàu ở yên vị trí phía trên thiết bị ROV phức tạp hơn rất nhiều.
Herman Biorn Amundesen cho biết: “Trong những điều kiện đó, các nhiệm vụ như khởi động và khôi phục thiết bị ROV có thể diễn biến thành một thách thức khi vận hành nó dưới nước."
Trong thực tế, những phức tạp bổ sung này có nghĩa là các nhiệm vụ của thiết bị ROV trong các trang trại chăn nuôi cá ngoài trời dễ bị kết thúc một cách đột ngột do cửa sổ thời tiết (xảy ra khi dự báo thời tiết chỉ ra rằng một tập hợp các hoạt động hàng hải hoặc hoạt động xây dựng ngoài khơi có thể được thực hiện trong thời gian tối đa của chúng đối với chiều cao sóng, tốc độ gió,..) đang khép lại. Điều này, đến lượt nó làm cho bất kỳ thời gian thừa nào có thể được dành hết cho việc kiểm tra lưới - một món đồ đáng lẽ nên được quý trọng hơn, làm nổi bật lên những lợi ích của việc điều hướng tự động bằng DVL. Thời gian là tiền bạc đối với các công ty nuôi trồng thủy sản vì khi bạn càng hoàn thành được nhiều việc trong thời gian ngắn hơn thì chi phí càng thấp hơn.
SINTEF cũng đang thực hiện một dự án có liên quan đó là CageReporter. Mục tiêu chính của dự án đó là để phát triển các hệ thống cảm biến để thu thập dữ liệu chất lượng cao từ bên trong các lồng nuôi cá đang sử dụng các phương tiện tự động và không có dây buộc, đồng thời truyền dữ liệu thu thập được vào đất liền.
Những dự án này đang tạo nền tảng cho một cuộc cách mạng trong lĩnh vực chăn nuôi cá. Họ sẽ giúp ngành sản xuất cá mở rộng thị trường thế giới với chi phí thấp trong nhiều môi trường rộng lớn hơn và có thể tiếp cận nhanh chóng với thông tin chi tiết hơn về sức khỏe cá, phúc lợi cá, chất lượng nước và tính nguyên vẹn của chiếc lồng.
Có thể bạn quan tâm
 Hướng dẫn bệnh cá - Chấy rận biển
Hướng dẫn bệnh cá - Chấy rận biển "Chấy rận biển" là một thuật ngữ được sử dụng để mô tả nhiều loài ngoại ký sinh thân giáp của chi Lepeophtheirus và Caligus.
 Vua cá chẽm của vùng đất Sóc Trăng
Vua cá chẽm của vùng đất Sóc Trăng Để theo đuổi được với nghề nuôi cá chẽm, đòi hỏi người nuôi cần phải có sức chịu đựng nhất định để vượt qua những thời điểm.
 EU sẽ là thị trường tỷ đô đầu tiên của tôm Việt Nam?
EU sẽ là thị trường tỷ đô đầu tiên của tôm Việt Nam? EU đang là thị trường lớn nhất của tôm Việt Nam với kim ngạch trên 800 triệu USD/năm. Trong năm nay, ngành hàng tôm đang kỳ vọng sẽ đạt mốc XK 1 tỷ USD
 Hướng đi mới từ mô hình nuôi tôm tít lồng
Hướng đi mới từ mô hình nuôi tôm tít lồng Mang lại hiệu quả khá cao, mô hình này đã mở ra hướng đi mới, được nhiều hộ dân trên địa bàn huyện học hỏi, nhân rộng.
 Hướng dẫn bệnh cá - Bệnh bơi xoắn ốc
Hướng dẫn bệnh cá - Bệnh bơi xoắn ốc Bệnh bơi xoắn ốc là một bệnh mạn tính do Myxobolus cerebralis, một động vật nguyên sinh ký sinh ảnh hưởng chủ yếu đến cá hồi vị thành niên.